Cuprins
- 1. Introducere in Biomecanica 4
- 1.1. Evolutia Biomecanicii 4
- 1.2. Diviziunile Biomecanicii 5
- 1.3. Caracteristici Biomecanice 6
- 2. Sistemul osos uman 8
- 2.1. Tesutul osos 8
- 2.1.1. Structura şi organizarea ţesutului osos 8
- 2.1.2. Tipuri de oase 10
- 2.1.3. Lanturi osoase 10
- 2.2. Structura sistemului osos ( componenta scheletului uman ) 11
- 2.2.1. Oasele capului 11
- 2.2.2. Coloana vertebrala 12
- 2.2.3. Oasele membrelor superioare 13
- 2.2.4. Toracele 15
- 2.2.5. Pelvisul si Osul coxal 17
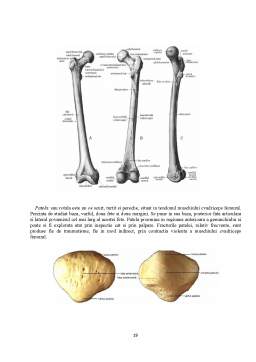
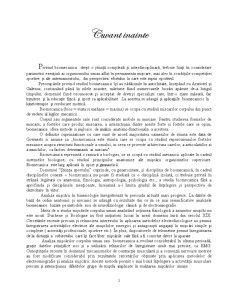
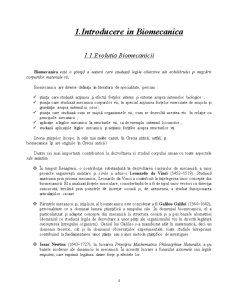
- 2.2.6. Oasele membrelor inferioare 18
- 3. Forte Parghii osoase Lanturi cinematice 22
- 3.1. Forte 22
- 3.2. Parghii osoase 23
- 3.3. Lanturi cinematice 24
- 4. Cinematica 25
- 4.1. Notiuni generale ale cinematicii 25
- 4.2. Metode de analiza cinematica 25
- 5. Statica 27
- 5.1. Reducerea fortelor 27
- 5.2. Stabilitate si echilibru 27
- 5.3. Aplicatii 28
- 6. Dinamica 30
- 6.1. Notiuni fundamentale ale dinamicii 30
- 6.2. Teoremele fundamentale ale dinamicii 31
- 6.3. Ecuatiile dinamicii 32
- 6.4. Aspecte aplicative ale dinamicii 34
- Anexe 35
- Bibliografie 42
Extras din proiect
1.Introducere in Biomecanica
1.1.Evolutia Biomecanicii
Biomecanica este o ştiinţă a naturii care studiază legile obiective ale echilibrului şi mişcării corpurilor materiale vii.
Biomecanica are diverse definiţii în literatura de specialitate, precum :
-ştiinţa care studiază acţiunea şi efectul forţelor interne şi externe asupra sistemelor biologice ;
-ştiinţa care studiază mecanica corpurilor vii, în special acţiunea forţelor exercitate de muşchi şi gravitaţie asupra sistemului osos ;
-ştiinţa care studiază cum se mişcă organismele vii, cum se dezvoltă acestea etc. în relaţie cu principiile mecanicii ;
-aplicaţie a legilor mecanicii la structurile vii, ca de exemplu sistemul locomotor ;
-studiază aplicaţiile legilor mecanicii şi acţiunii forţelor asupra structurilor vii.
Istoria ştiinţelor începe, în cele mai multe cazuri, în Grecia antică; astfel, şi
biomecanica îşi are originile în Grecia antică.
Dintre cei mai importanti contribuitori la dezvoltarea si studiul corpului uman cu toate aspectele sale amintim:
- În timpul Renaşterii, o contribuţie substanţială la dezvoltarea cursurilor de mecanică, a unor proiecte inginereşti militare şi civile a adus-o Leonardo da Vinci (1452–1519). Studiind anatomia prin prisma mecanicii, Leonardo da Vinci a contribuit la înţelegerea unor concepte din biomecanică. El a analizat forţele musculare, considerându-le a fi de tipul unor vectori cu direcţia cunoscută, trecând prin punctele de inserţie osoasă şi, de asemenea, a studiat funcţionarea articulaţiilor osoase.
- Părintele mecanicii şi, implicit, al biomecanicii este considerat a fi Galileo Galilei (1564–1642), personalitate ce a dominat lumea ştiinţifică a timpului său. În domeniul biomecanicii, el a particularizat şi adaptat concepte din mecanică la structura osoasă şi a pus bazele alometriei (domeniul ce studiază legile de dezvoltare a unor părţi ale organismului viu în directă legătură cucreşterea întregului organism). Geniul lui Galileo s-a manifestat atât în matematică, deci un domeniu teoretic, cât şi în domeniul observaţiilor experimentale, toate studiile întreprinse contribuind la fundamentarea unor ştiinţe sau a unor metode ştiinţifice de investigare.
- Isaac Newton (1643–1727), în lucrarea Principia Mathematica Philosophiae Naturalis, a pu bazele moderne ale dinamicii în mecanică. În această lucrare a formulat axiomele sau legile mişcării, care exprimă legătura dintre forţe şi efectele lor.
Aceste principii sunt admise ca postulate ale mecanicii clasice :
I. Principiul sau legea inerţiei (propus în 1638 de Galileo):
Care afirmă că un corp îşi păstrează starea de repaus sau de mişcare rectilinie şi uniformă atât timp cât nu intervine vreo acţiune mecanică care să-i modifice această stare.
II. Principiul sau legea acţiunii forţei :
Care afirmă că forţa care se exercită asupra unui punct material îi imprimă acestuia o acceleraţie dirijată după suportul forţei, având acelaşi sens cu ea şi al cărei modul este egal cu raportul dintre modulul forţei şi masa punctului.
Expresia vectorială a acestui principiu, respective : F = m⋅ a mai poartă şi denumirea de ecuaţia fundamentală a Dinamicii.
Dacă F = 0 , rezultă a = 0 , ceea ce confirmă principiul inerţiei şi arată că între cele două legi nu există contradicţii.
III. Principiul sau legea acţiunii şi reacţiunii :
Care afirmă că acţiunii reciproce dintre două puncte materiale sunt egale şi direct opuse, adică
ij ji F = −F ,unde primul indice al forţei F reprezintă punctul (corpul) care suportă acţiunea iar indicele al doilea reprezintă punctual (corpul) din partea căruia se transmite acţiunea (agentul motor).
Altfel spus, acest principiu afirmă că pentru fiecare acţiune există o reacţiune egală în mărime şi opusă ca sens.
Preview document








































Conținut arhivă zip
- Biomecanica Sistemului Osos.docx
Alții au mai descărcat și

Osteologia Osteologia studiază forma şi structura oaselor. Oasele se articulează între ele şi formează scheletul pe care se inseră muşchii....

Generalitati Glandele sunt formatiuni antaomice care au ca functie elaborarea unor produse speciale, care se varsa, fie in mediul intren, fie in...

1.Notiunea Dreptului constitutional. Subiectii DC Dreptul constitutional este ramura de drept care este formată din normele juridice care...

S1 1. Sistemul osos Oasele sînt piese dure, solide, care, articulate între ele, formează sistemul osos (scheletul); ele reprezintă partea pasivă...

S6 6. Sistemul muscular 6.1 Generalitaţi Muşchii sunt organe contractile care prin scurtare produc mişcare. Amplitu¬dinea mişcării este în...

Inapoi la pagina principala I. INTRODUCERE ÎN KINETOLOGIE 1. OBIECTUL DE STUDIU Kineziologia este o stiintã a naturii care studiazã legile...
Te-ar putea interesa și

MOTO “Viața este energie, efort interior, nazuință și împlinire. Viața este într-un cuvânt activitate. Aceasta este chiar nevoia fundamentală...

PROBLEMATICA GENERALA A ROBOTILOR INDUSTRIALI Robotica reprezinta un vast domeniu interdisciplinar, care cuprinde, atât din punct de vedere...

MOTIVATIA LUCRARII Mi-am ales aceasta tema, deoarece fracturile se intalnesc frecvent la toate varstele, dar mai ales la varste active, dar in...

ALE GAMBEI INTRODUCERE Se dă prea puţină atenţie păstrării sănătăţii.Totuşi e mai bine să previi boala decît să ştii să o tratezi,după ce...

Introducere Analiza mişcării în kinesiologie înregistrează în perioada actuală mari progrese. La datele de bază de ordin anatomic şi mecanic se...

Inapoi la pagina principala I. INTRODUCERE ÎN KINETOLOGIE 1. OBIECTUL DE STUDIU Kineziologia este o stiintã a naturii care studiazã legile...