Extras din proiect
Introducere
Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor integrate. Această dezvoltare a făcut posibilă înmagazinarea a sute de mii de tranzistoare într-un singur cip. Aceasta a fost o premiză pentru producţia de microprocesoare, şi primele calculatoare au fost făcute prin adăugarea perifericelor ca memorie, linii intrare-ieşire, timer-ii şi altele. Următoarea creştere a volumului capsulei a dus la crearea circuitelor integrate. Aceste circuite integrate conţin atât procesorul cât şi perifericele. Aşa s-a întâmplat cu primul cip conţinând un microcalculator, sau ce va deveni cunoscut mai târziu ca microcontroler a luat fiinţă.
Un microcontroler este un „calculator pe un chip”. Cuvantul „micro” sugerează mărimea redusă a dispozitivului iar „controler” ne spune că dispozitivul poate fi folosit pentru a controla obicte, procese sau evenimente.
Microcontrolerele pot fi găsite în componenţa oricarui tip de aparat. Orice aparat care măsoară, stochează, comandă, calculează sau afişează informaţii este o potenţială gazdă pentru un microcontroler. De exemplu orice automobil fabricat astăzi este echipat cu cel putin un microcontroler care comandă motorul maşinii şi adesea chiar cu mai multe pentru comanda sistemelor adiţionale din automobil. În calculatoare de birou (PC) se pot găsii microcontrolere în tastatură, modemuri, imprimante şi alte periferice. În echipamentele de testare fac posibilă adăugarea unor facilitaţi ca de exemplu memorarea rezultatelor masurării, afişarea mesajelor şi formelor de undă. Produsele de larg consum care includ microcontrolere sunt camerele video, video recorderele, compact-disk (CD) playere şi altele. Un microcontroler este similar unui microprocesor. Ambele conţin o unitate centrala de prelucrare sau UCP (cenral processing unit). CPU execută instrucţiuni care îndeplinesc operaţiile de bază logice, matematice şi de curgere a informaţiei.
Pentru a construi un calculator complet, microprocesorul necesită memorie pentru păstrarea datelor şi programelor, interfeţe de intrare-ieşire (I/O) pentru conectarea dispozitivelor externe cum ar fi tastatura sau monitorul. Spre diferentă de microprocesor, microcontrolerul este un calculator pe un chip deorece el conţine şi memorie şi interfete de intrare-ieşire pe langa CPU. Deoarece memoria şi interfetele care încap pe un chip sunt limitate, microcontrolerele tind să fie utilizate în sisteme mai mici care necesită doar un microcontroler şi câteva elemente adiţionale.
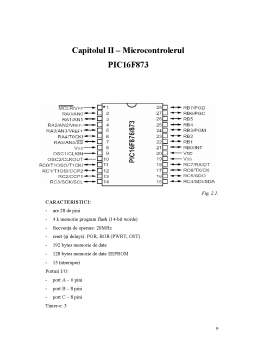
Lucrarea de faţă îşi propune să prezinte Implementarea sistemelor cu microcontroler în dispozitive de poziţionare în spaţiu. Aplicaţia practică fiind realizarea unui aparat de măsură a distanţei cu ajutorul ultrasunetelor. Este alcătuită din trei capitole, primul capitol face o scurtă prezentare a ultrasunetelor, capitolul al doilea realizează a prezentare amplă a microcontrolerului PIC16F873 care prin prelucrarea semnalului primit de la senzorul cu ultrasunete realizează afişarea distanţei, în capitolul al treilea se prezintă aplicaţia practică iar în final sunt prezentate câteva exemple în care sunt folosiţi senzorii cu ultrasunete.
Capitolul I – Ultrasunelete
Dintre vibraţiile sonore care ies din limitele de audibilitate ale urechii omeneşti, de un mare interes, din punct de vedere practic, sunt ultrasunetele, adică sunetele a căror frecvenţă este mai mare de 20 000 Hz.
Orientarea liliecilor, spre exemplu, se bazează pe faptul că aceştia emit semnale ultrasonore scurte de frecvenţe între 30 – 60 kHz. Liliacul în zbor emite în medie cca. 30 semnale pe secundă. O parte din acestea sunt recepţionate de urechile mari ale liliacului sub formă de semnale ecou, după un timp cu atât mai scurt cu cât obstacolul este mai aproape. Pe măsura apropierii de obstacol liliacul emite din ce în ce mai multe semnale într-o secundă ajungând ca de exemplu la un metru de obstacol să emită până la 60 semnale pe secundă. Aceasta permite liliacului să simtă precis poziţia sa faţă de obstacole.
Importanţa practică a ultrasunetelor este legată de lungimea de undă mică a acestora. Din această cauză, de exemplu, ultrasunetele pot fi emise şi se propagă ca şi razele de lumină sub formă de fascicule, spre deosebire de sunetele obişnuite care se împrăştie în toate direcţiile. Astfel se constată experimental că dacă lungimea undei emise este mai mică decât dimensiunile liniare ale sursei unda se va propaga în linie dreaptă sub formă de fascicul. În afară de aceasta, datorită lungimii de undă mici, fenomenul de difracţie (ocolirea obstacolelor) nu apare decât pentru obstacolele de dimensiuni foarte mici în timp ce sunetele obişnuite ocolesc practic aproape orice obstacol întâlnit în cale.
Ultrasunetele suferă reflexia şi refracţia la suprafaţa de separare a două medii diferite la fel ca undele luminoase. Folosind acest fenomen au fost construite oglinzi concave sau lentile speciale care să concentreze într-un punct fascicule de ultrasunete.
Deoarece intensitatea undelor sonore este proporţională cu pătratul frecvenţei, energia transportată de ultrasunete este mult mai mare decât energia sunetelor de aceeaşi amplitudine. Pe de altă parte în cazul ultrasunetelor fenomenul de absorbţie care apare la propagarea tuturor oscilaţiilor elastice devine foarte important. Intensitatea undei elastice scade cu distanţa de la sursă după o lege exponenţială I = I0 e-kr. Se poate arăta atât teoretic cât şi experimental că k depinde atât de caracteristicile mediului (densitate, vâscozitate, căldură specifică etc.) cât şi de frecvenţa undei care se propagă crescând cu pătratul frecvenţei. Din această cauză practic nu putem obţine propagarea ultrasunetelor, de exemplu în aer, la o distanţă mai mare de un kilometru.
Mai mult, un ultrasunet de o frecvenţă de cca. 3000 kHz este practic absorbit complet, la o distanţă de cca. 0,6 cm. În lichide coeficientul de absorbţie este de 2-3 ordine de mărime mai mic decât în aer, iar în solide şi mai mic, intensitatea ultrasunetelor fiind mult mai puţin atenuată.
Preview document












































































































Conținut arhivă zip
- Implementarea Sistemelor cu Microcontroler in Dispozitive de Pozitionare in Spatiu.doc