Cuprins
- 1. Tema de proiect 1
- 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare convenţionale 1
- 1.2. Proiectarea unui sistem de reglare automată numeric a puterii reactive a generatorului sincron 1
- 1.3. Performanţele impuse SRA sunt: 2
- 1.4. Cerinţe 3
- 2. Structura generală a schemei de reglare în cascadă a turaţiei motorului de curent continuu 4
- 3. Identificarea procesului tehnologic condus 6
- 3.1. Ecuaţiile de funcţionare ale motorului de curent continuu 6
- 3.2. Modelul matematic al procesului în limbajul intrare-stare-ieşire (ISO) 8
- 3.3. Determinarea funcţiei de transfer şi schemei echivalente a MCC 11
- 4. Alegerea şi dimensionarea traductoarelor de măsură şi a elementelor de execuţie 15
- 4.1. Alegerea traductoarelor 16
- 4.1.1. Traductorul de curent 16
- 4.1.2. Traductorul de turaţie 16
- 4.2. Elementul de execuţie 17
- 4.3. Dispozitivul de comandă pe grilă (DCG) 17
- 5. Alegerea şi acordarea regulatoarelor 18
- 5.1. Schema echivalentă a buclei interioare a sistemului de reglare a curentului rotoric 18
- 5.2. Proiectarea regulatorului cu structură analogică de tip PI cu filtrare 20
- 6. Teste pentru verificarea performanţelor 22
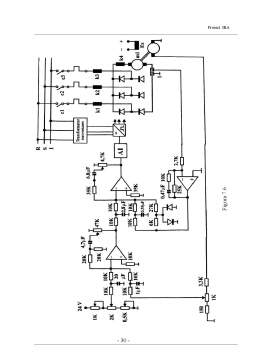
- 7. Blocuri auxiliare pentru sistemele de reglare ale proceselor rapide 25
- 7.1. Blocul de comandă pe grilă (IBCG). 25
- 7.1.1. Dispozitivul de comandă pe grilă DCG 26
- 7.1.2. Circuitul de sincronizare 27
- 7.2. Amplificatorul de impulsuri (de ieşire) IAE 28
- 8. Proiectarea a unui SRA pentru reglarea puterii reactive a unui generator sincron. Varianta numerică 30
- 8.1. Consideraţii teoretice 30
- 9. Alegerea şi acordarea algoritmilor de reglare 33
- 9.1. Proiectarea regulatorului R de pe calea directă 33
- Proiectarea regulatorului cu funcţia de transfer HR(s) în varianta analogică se face după criteriul modulului, varianta Kessler astfel obţinând un regulator tip PI: 33
- 9.2. Testarea buclei de reglare după referinţă 34
- 9.3. Proiectarea regulatorului după perturbaţie (RP) 35
- 9.4. Testarea buclei de reglare după perturbaţie 36
- ANEXE 37
- Anexa 1. Testele de verificare rezolvate în MATLAB 37
- 1.1. Programele de verificare a SRA de turaţie a MCC 37
- 1.2. Programele de verificare a SRA a puterii reactive a MS 40
- Anexa 2. Răspunsurile obţinute 45
- 2.1 Pentru motorul de curent continuu 45
- 2.2. Pentru generatorul sincron 46
- Pentru generatorul sincron 49
- Bibliografie 54
Extras din proiect
1. Tema de proiect
1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare convenţionale
Motorul de curent continuu are excitaţia independentă şi e comandat pe indus (rotor). Tensiunea indusului e furnizată de un element de execuţie cu punte bifazată cu tiristoare utilizând o structură de reglare în cascadă cu regulatoare convenţionale sau cu structură hibridă cu un regulator convenţional sau o structură hibridă cu un regulator convenţional şi un regulator numeric.
Datele sistemului de acţionare cu motorul de curent continuu sunt următoarele:
- tensiunea nominală Un= 440 [V c. c.]
- turaţia nominală nn= 3000 [rot / min]
- randamentul motorului = 0,77=77%
- puterea nominală Pn= 11 [kW]
- momentul de inerţie al rotorului GDr2 = 2.5 [kg•m2 ]
- momentul de inerţie a sarcinii GDs2 = 1.6 - x = 2.774 [kg•m2]
unde x se determină cu următoarea relaţie
x = 0.7 + 0.05 ( xp - 0.7), xp = 21 => x = 1,715
Perturbaţia principală e cuplul rezistent tip treaptă.
1.2. Proiectarea unui sistem de reglare automată numeric a puterii reactive a generatorului sincron
Motoarele sincrone cu puterea nominală de la 100 kW – 200 kW sunt utilizate în industrie pentru acţionarea unor maşini de lucru cu mare putere cu turaţie constantă. Datorită parametrilor energetici superiori (randament, cos , n), motoarele sincrone au primit o largă utilizare în industrie. Avantajul principal al motorului sincron faţă de alte tipuri de motoare constă în faptul că poate furniza energie activă în reţea, îmbunătăţind factorul de putere al reţelei de alimentare.
Ca urmare a îmbunătăţirii factorului de putere se reduc pierderile de energie în reţeaua de alimentare. Problema care se repune în prezent la acţionarea motoarelor sincrone constă în reglarea automată a excitaţiei motorului sincron, care să conducă la pierderi minime.
În cadrul acestui proiect se va proiecta un SRA numeric a puterii reactive a motorului sincron.
Datele motorului sincron sunt:
- puterea aparentă nominală Sn = 4.5 [kVA]
- puterea reactivă nominală Qn = 3000 VAR = 3 [kVAR]
- tensiunea de excitaţie nominală Uex n = 60 [V]
- semnalul de comandă a sistemului de reglare Uu= 0 10 [V c. c.]
1.3. Performanţele impuse SRA sunt:
- suprareglaj la intrare treaptă = 8 %
- curentul de pornire se impune a fi limitat la valoarea I l = 1.8 In
- eroarea staţionară pentru intrare treaptă st = 0
- eroarea staţionară la o intrare treaptă a sarcinii st = 0
- precizia reglării p = 5 % raportat la sarcina minimă când viteza variază de la 0 la valoarea nominală a vitezei
- tensiunea reţelei de alimentare variază în limitele 5 %
- temperatura mediului ambiant 10 40 o C
1.4. Cerinţe
1. Identificarea funcţiei de transfer a motorului.
2. Schema funcţională si funcţia de transfer a buclei interioare de reglare.
3. Schema funcţională si funcţia de transfer a buclei exterioare de reglare.
4. Schema funcţională si funcţia de transfer echivalentă buclei interioare şi exterioare.
5. Ecuaţiile de funcţionare ale procesului condus respectiv a motorului de curent continuu în modelul ISO.
6. Funcţia de transfer a procesului condus în modelul IO.
7. Alegerea şi acordarea regulatoarelor.
8. Funcţia de transfer a regulatorului de curent din bucla interioară şi parametrii de acord al regulatorului calculat după criteriul modulului, varianta Kessler.
9. Funcţia de transfer a regulatorului de turaţie de pe bucla exterioara si parametrii de acord ai regulatorului ales după criteriul simetriei şi determinarea valorilor parametrilor (rezistenţe, capacităţi) ale regulatorului de turaţie realizat cu AO.
10. Calculul regulatorului numeric de turaţie care înlocuieşte regulatorul analogic de turaţie din bucla exterioară.
11. Bucla interioară se testează la o variaţie de tip treaptă a semnalului de intrare.
12. Bucla exterioară se testează la o variaţie tip treaptă şi rampă a semnalului de intrare (referinţă).
Preview document

























































Conținut arhivă zip
- Ingineria Reglari Automate.doc
Alții au mai descărcat și

1Modelarea, simularea si reglarea unghiului de sarcina la valoarea dorita, la un servomotor de curent continuu Fie un motor de curent continuu cu...

CAPITOLUL 1 PROBLEMATICA SISTEMELOR DINAMICE 1.1. Aspecte generale privind noţiunea de sistem În general noţiunea de sistem este utilizată în...

1. Tema referatului Să se proiecteze un sistem de reglare automată a debitului având următoarele date iniţiale: • Sistemul este folosit pentru...

Interesul pentru teoria modelării şi identificării nu a izvorât numai din necesitatea îmbunătăţirii performanţelor sistemului, dar şi din dorinţa...

Sa se proiecteze sistemul de reglare automata a vitezei/pozitiei unui motor de c.c. cu excitatie independenta (flux constant), utilizat pentru o...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

1. INTRODUCERE 1.1. Evoluţia istorică a tehnicii acţionărilor Acţionarea înseamnă o mişcare controlată unde se încearcă utilizarea forţelor...
Te-ar putea interesa și

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

1. Introducere Scopul principal al unei sere este de a îmbunătăți condițiile de mediu în care plantele sunt crescute. Serele permit o monitorizare...

CAPITOLUL 1. GENERALITǍŢI (FENOMENOLOGIA FRECARII) Frecarea este prezentă în toate maşinile care încorporează părţi în mişcare relativă. Deşi...

INTRODUCERE În cadrul proceselor petrochimice exista numeroase sisteme de reglare automata în cascada. Dintre cele mai importante enumeram:...

Cap.I. Definiții și particularități ale sistemelor de urmărire I.1. Noțiuni introductive Sistem de urmărire = sistem de control al poziției,...

Partea I-a CONDUCEREA PROCESELOR DUPA MARIMEA DE IESIRE 1. Structuri de baza si metode de proiectare 1.1. Structuri de reglare si metode de...

Capitolul I : : Introducere in Ingineria Reglarii Automate : : 1.1 Exemple de SRA ( Sisteme de reglare automata) 1 . Sistem de reglare a...

C1. Structura şi proiectarea unui SRA Structura unui SRA Figura 1. Structura generala a unui SRA unde: REG = regulator EE = element de executie...