Extras din proiect
1.Introducere
In acest proiect am realizat o scurta prezentare despre laboratoarele ESA. Proiectul abordeaza:
- construirea puntii H: circuit electronic folosite in robotica si in alte aplicatii pentru a permite motoarelor de current continuu sa se miste inainte si inapoi
- regulatoarele continue liniare(conventionale) de tipul P, PI: regulatoare cu actiune continua, la care eroarea ε si comanda u variaza continuu in timp;
- regulatorul Fuzzy: se proiecteaza pe baza cunostintelor oferite de un expert uman , fara sa fie necesara cunoasterea modelului matematic al procesului;
- un montaj realizat in CodeVisionAVR pentru programarea microcontrolului .
2. Contruirea puntii H (H-bridge)
Sa incepem cu numele, punte H(H-bridge). Uneori numita si „full bridge”numita astfel pentru ca are patru elemente de comutatie „la colturi” de H si motorul formeaza bara transversala.
Puntea de baza
De remarcat este faptul ca, in teorie, exista patru elemente de comutare in punte.
Comutatoare sunt pornite in perechi, fie cel din stanga sus impreuna cu cel din dreapta jos, fie cel sin stanga jos impreuna cu cel din drepata sus, dar niciodata nu sunt pornite ambele de sus sau ambele de jos jos If both switches on one side of a bridge are turned on it creates a short circuit between the battery plus and battery minus terminals. Daca ambele intrerupatoare de aceeasi parte a puntii sunt pornite se creeaza un scurt-circuit intre terminalele plus si minus ale bateriei
Stanga sus Dreapta sus Stanga jos Dreapta jos Descriere
On Off Off On Motorul merge in senseul acelor de ceasornic
Off On On Off Motosul merge in sensul acelor de cesornic
On On Off Off Motorul se opreste. Scurt circuit
Off Off On On Motorul se opreste. Scurt circuit
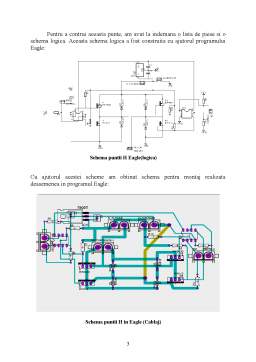
Pentru a contrui aceasta punte, am avut la indemana o lista de piese si o schema logica. Aceasta schema logica a fost construita cu ajutorul programului Eagle:
Schema puntii H Eagle(logica)
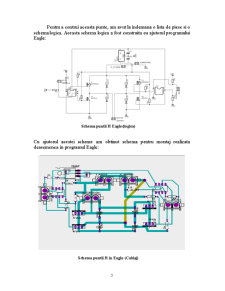
Cu ajutorul acestei scheme am obtinut schema pentru montaj realizata deasemenea in programul Eagle:
Schema puntii H in Eagle (Cablaj)
3. Regulator de tip P
Regulator cu actiune proportionala ( P )
La acest regulator intre marimea de intrare ε(t) si cea de comanda u(t) se stabileste o relatie de proportionalitate: u(t)=KR⋅ε(t),unde KR reprezinta factorul de amplificare al regulatorului si este parametrul de accord al regulatorului.
Acest parametru de accord poate fi modificat in limite largi,in functie de performantele impuse sistemului de regalre automat.
Preview document











Conținut arhivă zip
- Proiect ESA.doc
Te-ar putea interesa și

INTRODUCERE În ultimii ani, societatea românească trece printr-o perioadă caracterizată de o continuă schimbare socială: se schimbă normele...

Cap. 1 Funcţiile comerţului Comerţul este un sector de activitate precisă, complexă a economiei şi se desfăşoară în diferite forme (comerţ cu...

CAPITOLUL 1. SISTEMUL FINANCIAR – STRUCTURĂ ȘI FUNCȚIONARE 1.1. Structura sistemului financiar european Ca și în alte domenii ale activității...

DATORIA EXTERNA A ROMÂNIEI Prin măsurile adoptate la începutul anului 2017, Guvernul are încredere în capacitatea de mobilizare a mediului de...

1. Întroducere În general, tehnicile de management al timpului de realizare a unui proiect pot fi grupate în două metode, Diagrma Gantt și...

Cap. 1 Funcţiile comerţului Comerţul este un sector de activitate precisă, complexă a economiei şi se desfăşoară în diferite forme (comerţ cu...

1991 - Erupția vulcanului Pinatubo Pinatubo sau Mount Pinatubo este un vulcan activ de pe insulele Filipine, mai precis în regiunea centrală a...

1. Introducerea 1.1 Introducerea subiectului SKYLON a fost proiectat pentru a asigura un transport ieftin şi sigur la orbita terestră joasă. Este...