
Extras din proiect
SISTEM DE ACȚIONARE ELECTRICĂ CU M.C.C. (SA-m.c.c.)
A. Obiectivele proiectului: Parcurgerea principalelor etape de proiectare algoritmică a unei structuri
cu conducere automată (SCA) cu aplicația "reglarea vitezei unghiulare /turației unui sistem de
acționare cu m.c.c. (SA-m.c.c.)":
- însușirea principiului și a schemei bloc funcționale a unui SA-m.c.c.;
- determinarea MM aferent SA-m.c.c.; întocmirea schemei bloc informaționale aferente; calculul
VRSC pentru regimuri particulare de funcționare a SA-m.c.c. si construirea caracteristicilor statice
(CS) aferente SA-m.c.c.;
- alegerea unor structuri de conducere automată (variante);
- calculul algoritmic al blocurilor de conducere (regulatoarelor);
- proiectarea dimensional-constructivă a blocurilor de conducere (a regulatoarelor aferente);
- calculul VRSC pentru unele regimuri particulare de funcționare;
- simularea pe calculator numeric a unor variante de SCA.
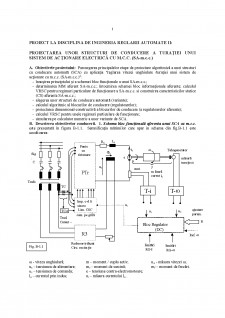
B. Descrierea obiectivelor conducerii. 1. Schema bloc funcțională aferenta unui SCA cu m.c.c.
este prezentată în figura B-1.1. Semnificația mărimilor care apar in schema din fig.B-1.1 este
următoarea:
ω - viteza unghiulară; m - moment / cuplu activ; uω - măsura vitezei ω;
ua - tensiunea de alimentare; ms - moment de sarcină; mf - moment de frecări.
uc - tensiunea de comanda; e - tensiune contra-electromotoare;
Ia - curentul prin indus; ui - măsura curentului Ia .
Punte
cu
tiristoare
PTr
Imp. c-d ă
sincro
Lim. CSC
R3
TCA
TC
Trad.
Curent ∼
com. pe grilă
Sig
.
C
Trafo
ua
Φe
Ra La
e
T-i T-ω
sunt
n
ia ω
J
măsură
curent ia
măsură
tura țieω
limitări
RG-I
Tahogenerator
Bloc Regulator
(DC)
limitări
RG-ω
Ref. ω
ajustare
param.
ui uω
R
Redresor trifazat
Fig. B-1.1 Circ. excita ție
uc
2
2. Cerințe de functionare/ de conducere impuse unui SA-m.c.c.. Cerințele de conducere se impun:
a.) În raport cu referința (prescrierea de viteza):
- eroare de reglare de de regim stationar constant (RSC) eω∞ = 0;
- suprareglajul in raport cu o variație treaptă a referinței, sub o valoare impusa:
σ1 ≤ σ1imp;
- timp de reglare la o variație treaptă a referinței, sub o valoare impusa:
tr ≤ trmax.adm..
- rezervă de fază de valoare minimă impusă, φr imp .
b.) În raport cu perturbația (momentul de sarcina):
- caracter astatic in raport cu o perturbatie constanta, γn=0.
In acest scop se propun urmatoarele variante de structuri conducere automată (SCA /DC):
- Structura de conducere automată in circuit deschis cu compensare după perturbație, SCA-CD-v
respectiv DC aferent (opțional);
- Structura de conducere automată în circuit inchis în cascadă (SCA-csd) respectiv DC aferent;
- Structura de conducere automată după stare (SRA-x), respectiv DC aferent.
3. Modelarea matematică a procesului condus (PC), SA-m.c.c.. Schema bloc informationala
aferentă. Condițiile în care se stabilește MM aferent PC (SA-m.c.c.) sunt următoarele:
- fluxul de excitație este constant, Φe = ct.;
- se neglijează neliniaritățile datorate diferitelor elemente constructive (m.c.c., ansamblul de
comanda pe grilă + puntea cu tiristoare, PTr + c-dă pe grilă, ș.a.);.
- pentru simplificarea scrierii, se acceptă că parametrii indusului și ai bobinei de filtrare sunt
comasați, fiind scriși în forma:
a bf sh
not
a R = R + R + R ; a bf
not
a L = L + L
- momentul de inerție al mecanismului antrenat, J , este constant:
J=Jmotor+Jmec. antrenat
- traductoarele de măsură au caracteristici statice liniare (liniarizate).
a.) Ecuațiile primare aferente PC sunt următoarele:
- SA-m.c.c. + mecanismul antrenat:
R i u e
dt
L di a a a
a
a + = − ; e = keω; m = kmia; (1)
; s f m m m
dt
J dω = − −
mf = kfω; (2)
Observație: în calculul de acordare a parametrilor RG se va accepta kf≈0; și că numeric km≈ka .
- Elementele de măsură: în cele ce urmează se acceptă că elementele de măsură sunt de tip
proporțional și sunt caracterizate de următoarele relații:
T-i - traductorul de curent: uI = kMiia (3)
T-ω - traductorul de viteză: uω = kMωω (4)
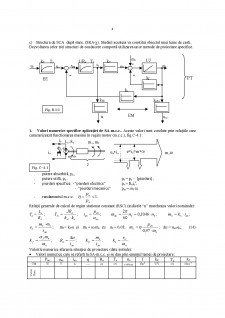
- Elementul de execuție este compus din ansamblu de comandă pe grilă (ACG) + punte cu
tiristoare (PTr), fig. B.3.1, și are MM simplificat de forma :
Preview document












Conținut arhivă zip
- Proiectarea unor structuri de conducere a turatiei unui sistem de actionare electrica cu M.C.C. (SA-m.c.c.).pdf
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

MEMORIU TEHNIC Prin tema s-a cerut proiectarea unui arbore de antrenare al unui transportor cu banda cu urmatoarele caracteristici tehnice: -...

Capitolul 1. Studiu bibliografic privind maşini – unelte similare celei studiate 1.1 Tipuri de maşini – unelte similare Centrele de prelucrare...

TEMA DE PROIECT Sa se proiecteze mecanismul de realizare a miscarii de rotatie dupa axa Oz din cadrul subansamblului cinematic principal ce...

ARGUMENT Automatica cuprinde totalitatea metodelor si a mijloacelor tehnice prin care se stabilesc legaturi corespunzatoare intre instalatiile...

Calculul mecanic general Prezentarea schemei cinematice Schema cinematica este prezentata in fig. CI.1.1. Motorul electric asincron trifazat cu...

TEMA PROIECTULUI Sa se proiecteze mecanismul de relizare a miscarii de rotatie dupa axa z din cadrul subansamblului cinematic principal si...

Obiectivele proiectării: Parcurgerea principalelor etape de proiectare algoritmică a unor structuri de conducere automată a turaţiei unui sistem de...

Capitolul 1 Introducere Revoluția informatică (a doua revoluție industrială) a marcat saltul de la societatea industrializată la societatea...