Extras din proiect
1. Tema proiectului:
Sa se proiecteze un actuator electromagnetic liniar (aeml) cu intrefier patrat care va fi utilizat intr-o aplicatie de pozitionare:
Parametri impusi:
1. Sarcina exterioara preponderent inertiala, masa ansamblului mobil: m=0,9 [kg];
2. Cursa maxima: [mm];
3. Cursa activa: [mm];
4. Timpul mediu de pozitionare: [s];
5. Tensiunea nominala: [V];
6. Inductia magnetica remanenta: [T];
7. Intensitatea campului magnetic coercitiv: [kA/m];
8. Energia magnetica maxima: [kj/ ];
9. Permeabilitatea magnetica de revenire: ;
10. Latura sectiunii patrate a magnetului: [mm];
11. Intrefier: δ=1,1 [mm]
1.1 Notiuni generale
In ultimii ani actionarile electrice cu actuatori liniari au cunoscut o dezvoltare deosebita. Unele caracteristici specifice ca: lipsa contactelor electrice rotative, cuplarea directa a receptorului mecanic cu ansamblul mobil al actuatorului si simplitatea constructiva ii fac competitivi cu actuatorii rotativi.
Actuatorii electromagnetici liniari sunt compatibili cu tehnica numerica de reglare. Aplicatia majora, care a consacrat acesti actuatori in tehnologia mecatronicao constituie pozitionarea capetelor de inregistrare pe discurile magnetice.
Performantele functionale confirmate in aceste aplicatii au stimulat cercetarile in domeniu si drept rezultat au aparut noi tipuri constructive identificandu-se si noi domenii de aplicare cum ar fi microrobotica, tehnologia electronica, etc.
Prin comparre cu actuatorii rotativi, constructia actuatorilor elecromagnetici liniari este in buna masura determinata de natura aplicatiei. Aceasta particularitate explica diversitatea constructiva a aeml.
1.2 Principii constructive si functionale
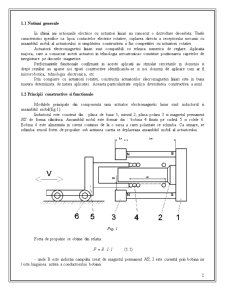
Modulele principale din componenta unui actuator electromagnetic liniar sunt: inductorul si ansamblul mobil(fig.1).
Inductorul este construit din : placa de baza 1, miezul 2, placa polara 3 si magnetul permanent NS de forma cilindrica. Ansamblul mobil este format din : bobina 4 fixata pe cadrul 5 si rolele 6. Bobina 4 este alimentata in curent continuu de la o sursa a carei polaritate se schimba. Ca urmare, se schimba sensul fortei de propulsie sub actiunea careia se deplaseaza ansamblul mobil al actuatorului.
Fig. 1
Forta de propulsie se obtine din relatia:
(1.1)
- unde B este inductia campului creat de magnetul permanent NS, I este curentul prin bobina iar l este lungimea activa a conductorului bobinei.
Produsul:
(1.2)
reprezinta constanta de forta a actuatorului. Magnetul permanent metalic NS, de lungime este magnetizat longitudinal, liniile de flux Ψ inchinzandu-se radial, in intrefierul circular δ de lungime . Actuatorul se numeste cu bobina lunga si intrefier scurt intrucat .
Dezavantajul principal al acestui tip de actuator este fluxul de scapari mare care creeaza probleme in legatura cu protectia altor suansambluri.
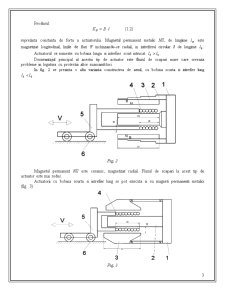
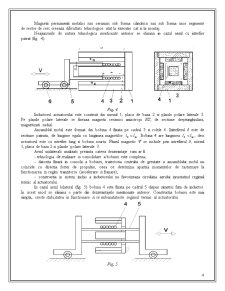
In fig. 2 se prezinta o alta varianta constructiva de aeml, cu bobina scurta si intrefier lung .
Fig. 2
Magnetul permanent NS este ceramic, magnetizat radial. Fluxul de scapari la acest tip de actuator este mai redus.
Actuatorii cu bobina scurta si intrefier lung se pot executa si cu magneti permanenti metalici (fig. 3).
Preview document















Conținut arhivă zip
- Actuatori Electromagnetici Liniari (AEML).doc
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

1. Noţiuni generale În ultimii ani acţionările electrice cu actuatori liniari au cunoscut o dezvoltare deosebită. Unele caracteristici specifice...

1. Tehnologia de prelucrare a fibrelor de carbon Fibrele de carbon au numeroase avantaje : proprietati mecanice remarcabile, cost scazut,...